
















CS機器人通過codesys與兩臺CS機器人進行EIP通訊
1. 簡介
EtherNet/IP 是一種基于以太網技術的工業自動化網絡協議,是以太網技術
在工業領域的應用。它是由羅克韋爾自動化公司(Rockwell Automation)開發
的,是一種開放的網絡標準,可以用于連接各種各樣的設備,如 PLC、傳感器、
執行器、HMI 等。
EtherNet/IP 協議基于 TCP/IP 協議棧,采用了面向連接和面向無連接的通
信方式,可以實現高速的數據傳輸和實時的控制。它可以支持 10Mbps、100Mbps
和 1000Mbps 三種傳輸速率,距離可以達到 100 米或更遠。同時,EtherNet/IP
還具有很強的靈活性和可擴展性,可以支持多種拓撲結構和協議適配器。
EtherNet/IP 協議的主要特點包括:
高速傳輸:EtherNet/IP 可以支持多種傳輸速率,可以滿足不同應用場景的
需求。
實時性強:EtherNet/IP 可以實現高速數據傳輸和實時控制。
靈活性強:EtherNet/IP 可以支持多種拓撲結構和協議適配器。
易于集成:EtherNet/IP 是一種開放的網絡標準,可以與各種各樣的設備集
成使用。
可擴展性強:EtherNet/IP 可以通過加入新的協議適配器和功能模塊來擴展
網絡功能。
安全性好:EtherNet/IP 支持多種安全機制,如 VLAN、VPN、IPsec 等,可以
保證網絡安全。
CS 系列產品支持EtherNet/IP 從站應用。 如果機器人作為從設備運行,只需
設置好 IP 地址及開啟 Ethernet/IP 功能即可,無需進行其他設置
2. 操作指導
2.1.機器人端配置
2.1.1 設置 IP 地址
PC 連接使用 FB1 網絡,Codesys 使用 PC 端,IP 地址設置 FB1 網絡。
第一臺機器人地址為 172.16.201.101

第二臺機器人地址為 172.16.201.102

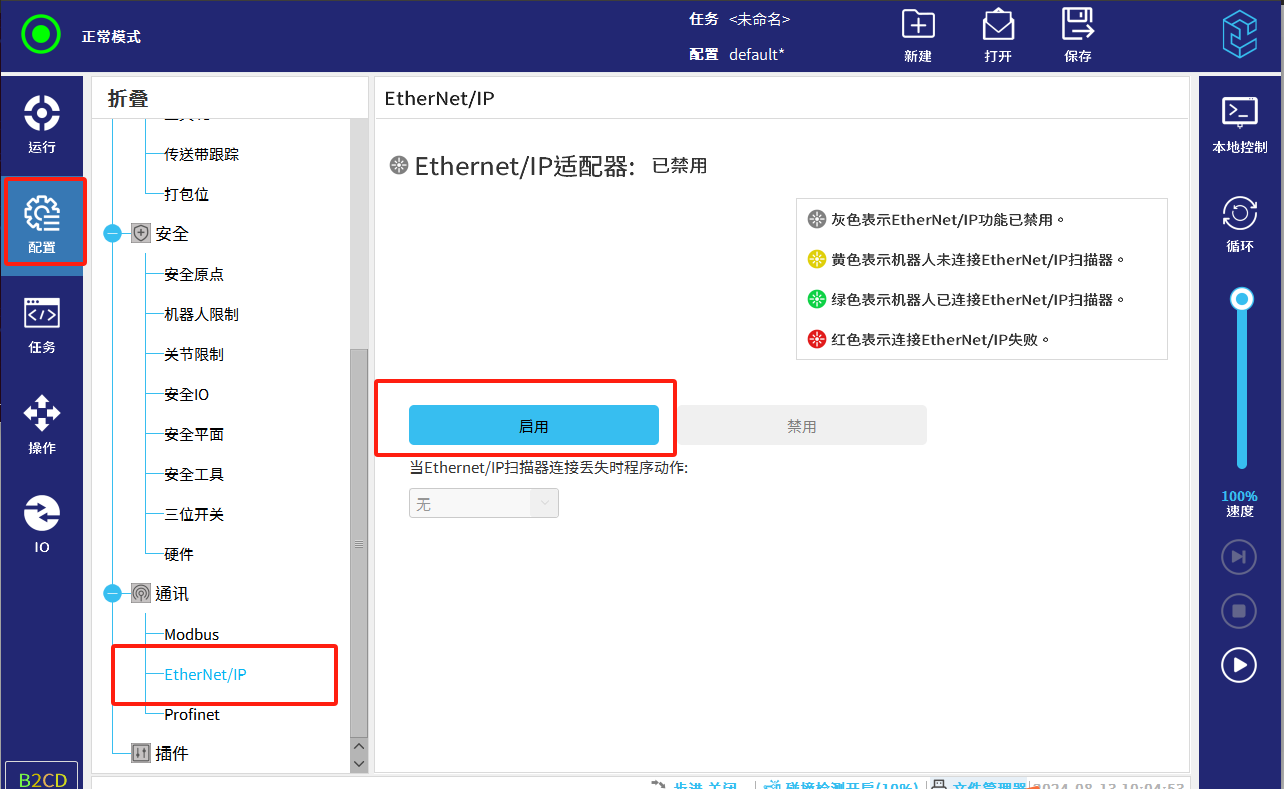
2.1.2 激活EtherNet/IP
點擊配置---EthereNet/IP---啟用
2.2 codesys配置
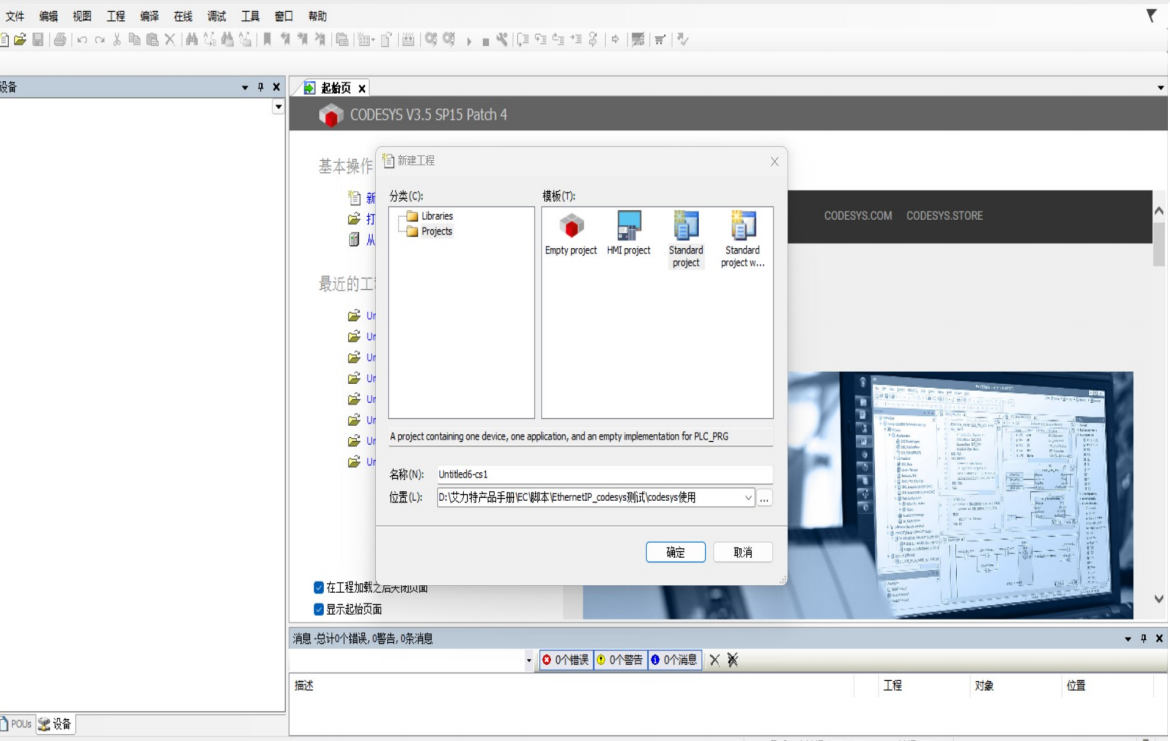
2.2.1 新建程序
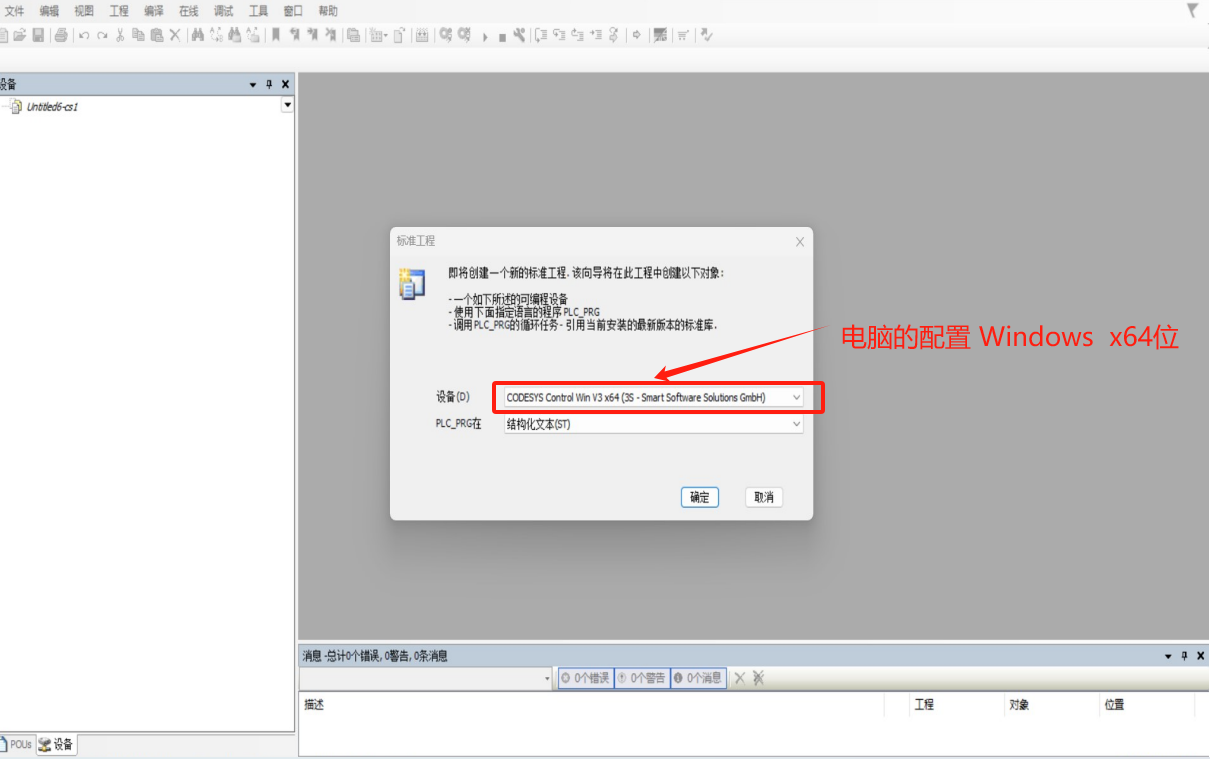
2.2.2 選擇對應設置型號
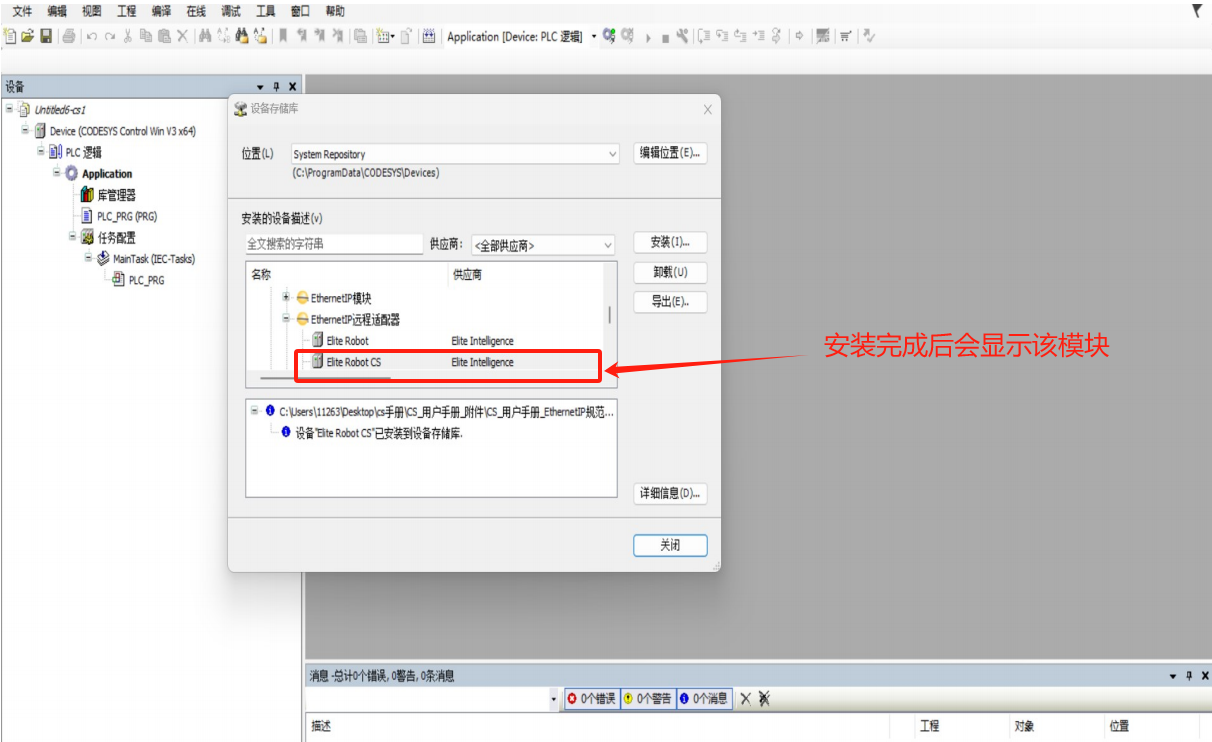
2.2.3 配置對應的 eds 文件(2.12版本之前無分類卡槽,2.12版本之后卡槽可分類,可根據對應版本安裝對應的eds文件)
選擇工具-設備存儲庫-安裝
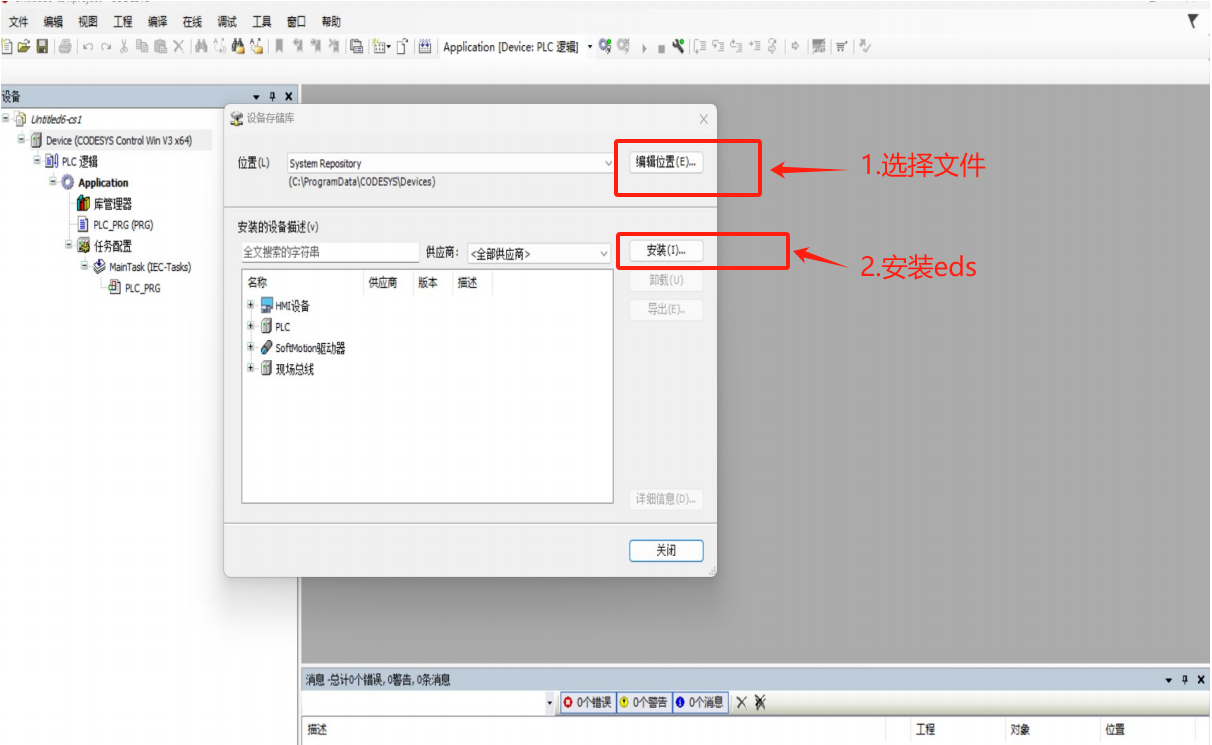
安裝完成
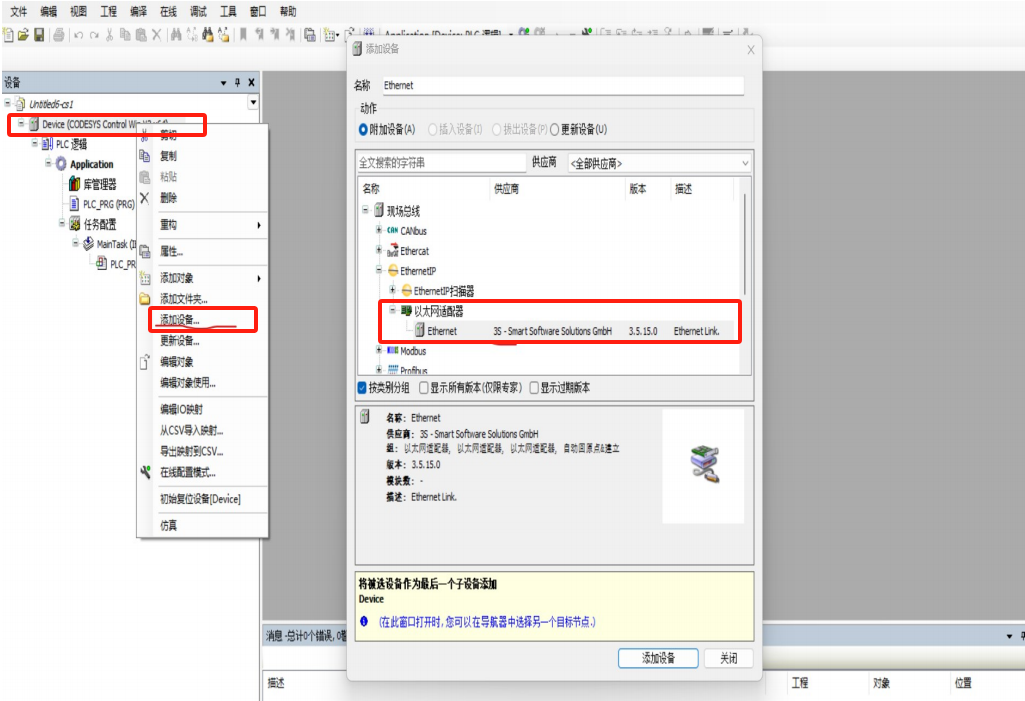
2.2.4 添加EtherNet/IP設備
選擇 Device-添加設備-EthernetIP-以太網適配器-Ethernet
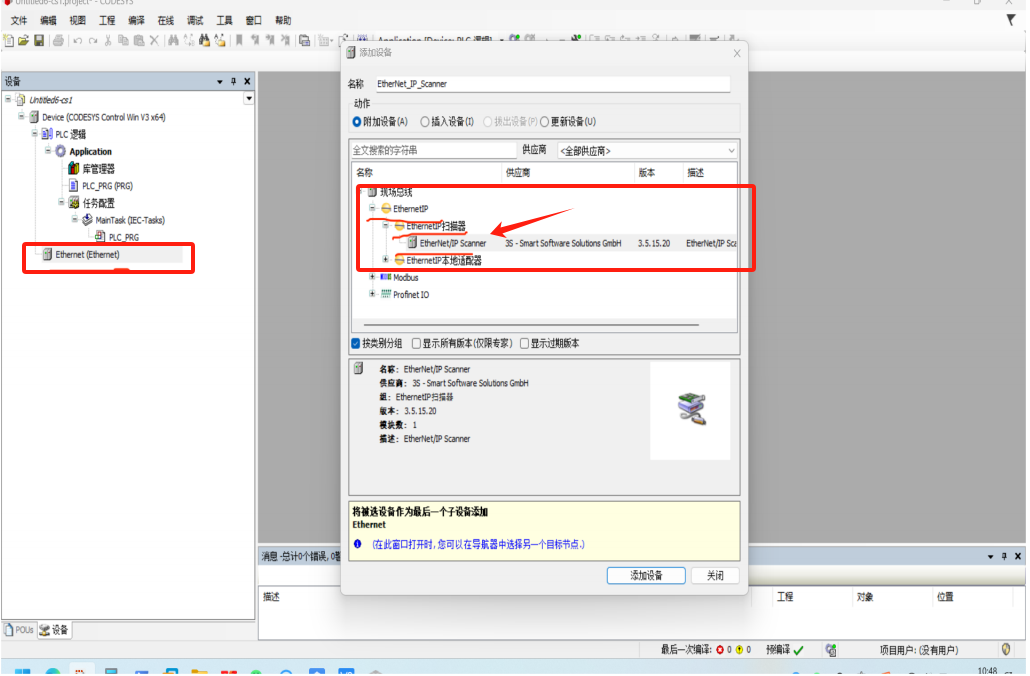
選擇 Ethernet-添加設備-EthernetIP-EthernetIP 掃描器-Ethernet/IP Scanner(同樣的操作,添加兩個Ethernet/IP Scanner)
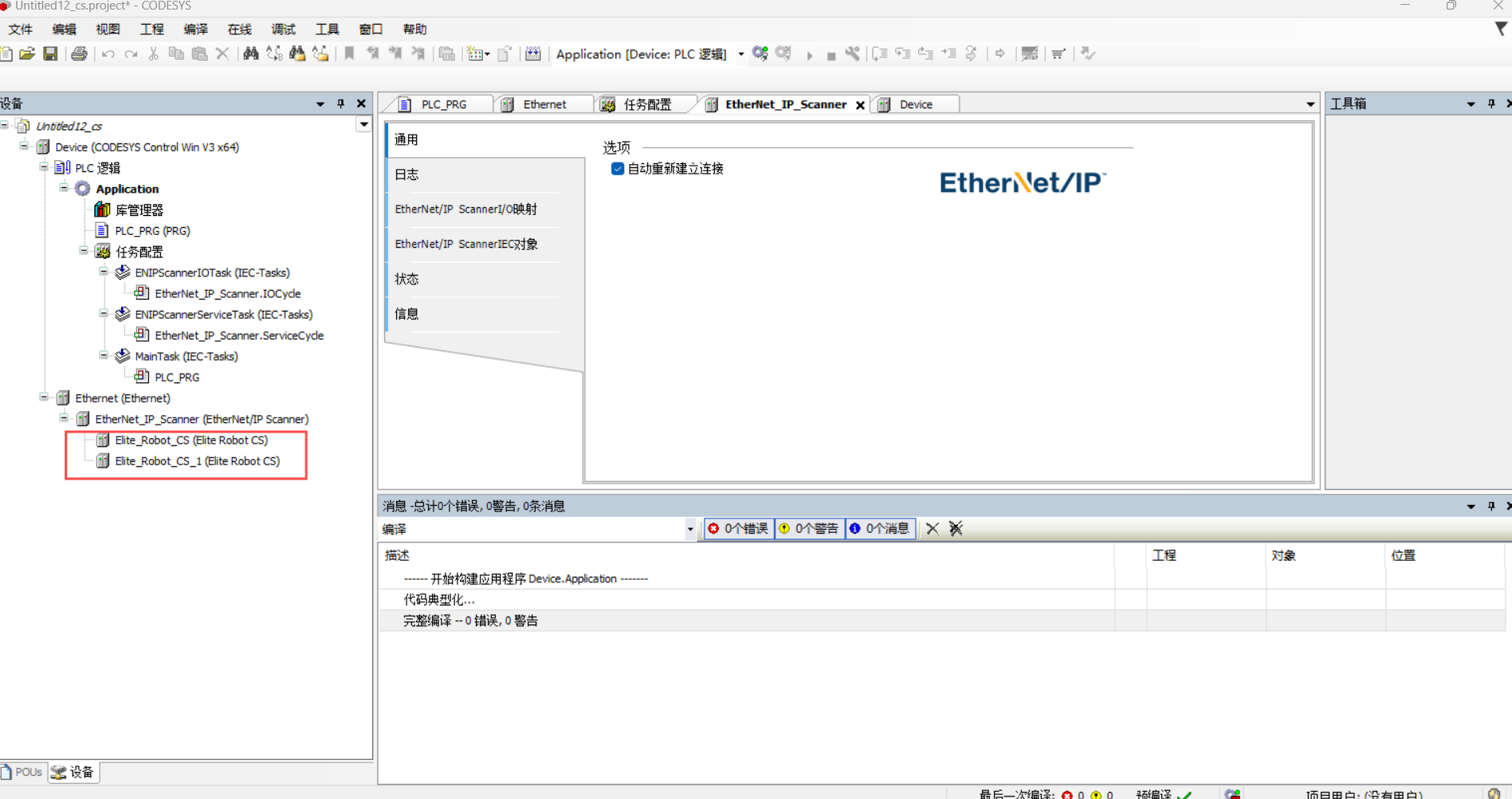
選擇 Ethernet/IP Scanner-添加設備-EthernetIP-EthernetIP 遠程適配器-Elite Robot CS
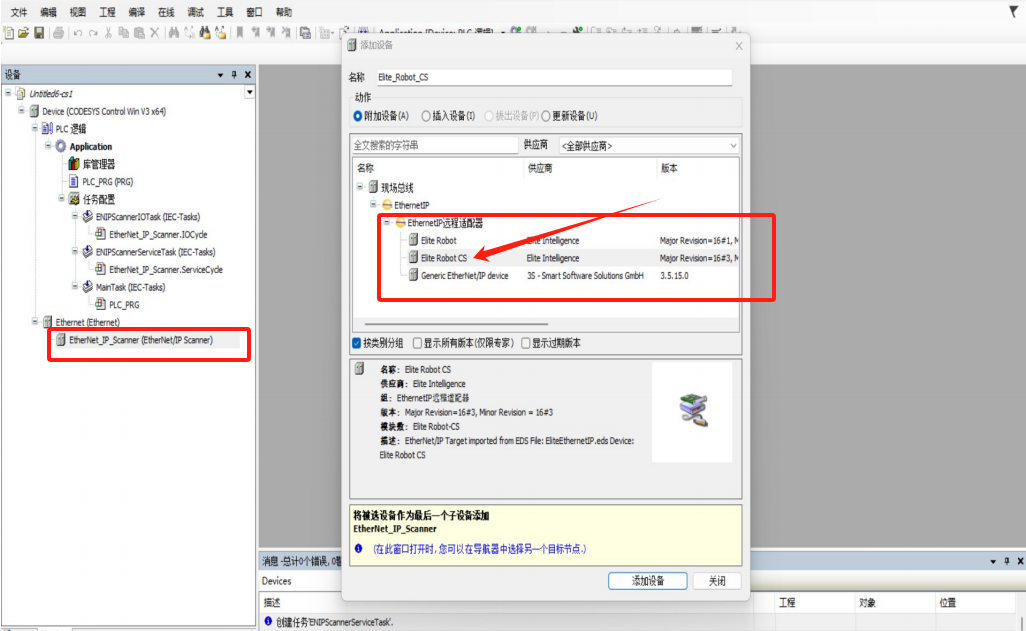
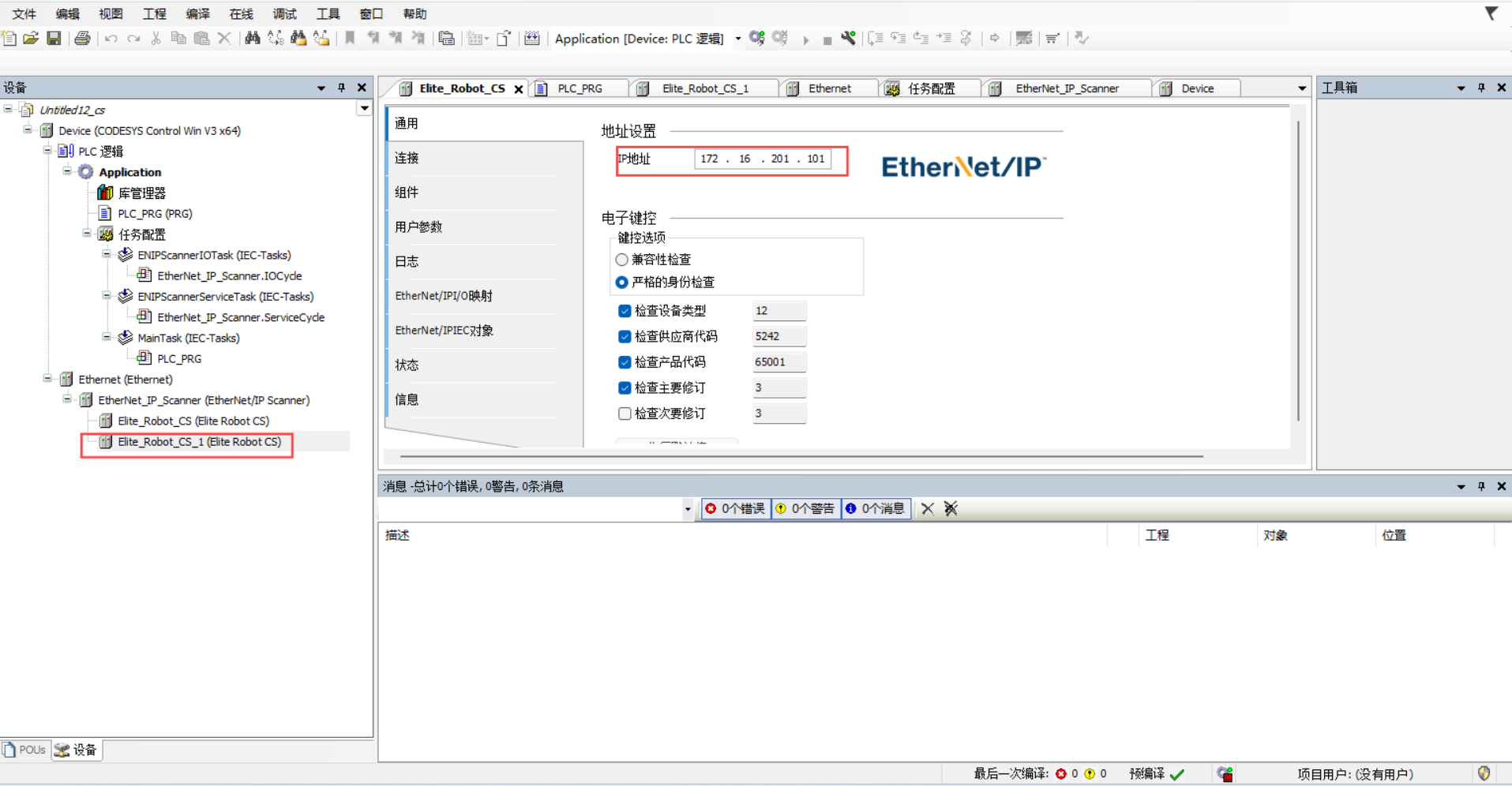
同上操作添加兩臺Elite Robot CS,如下圖
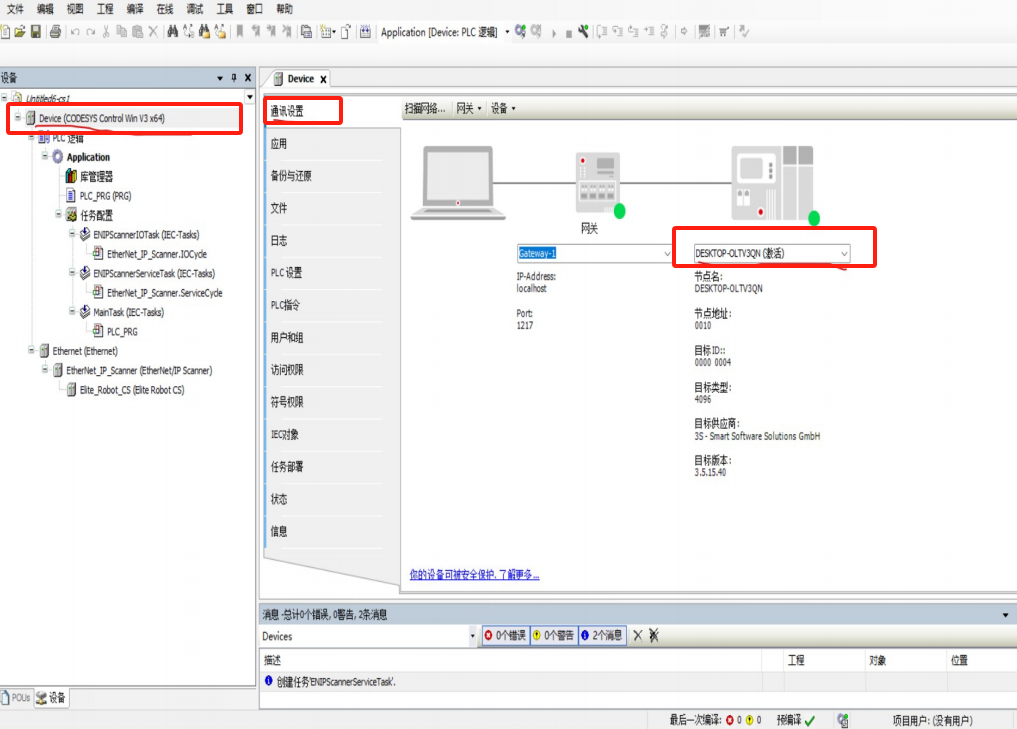
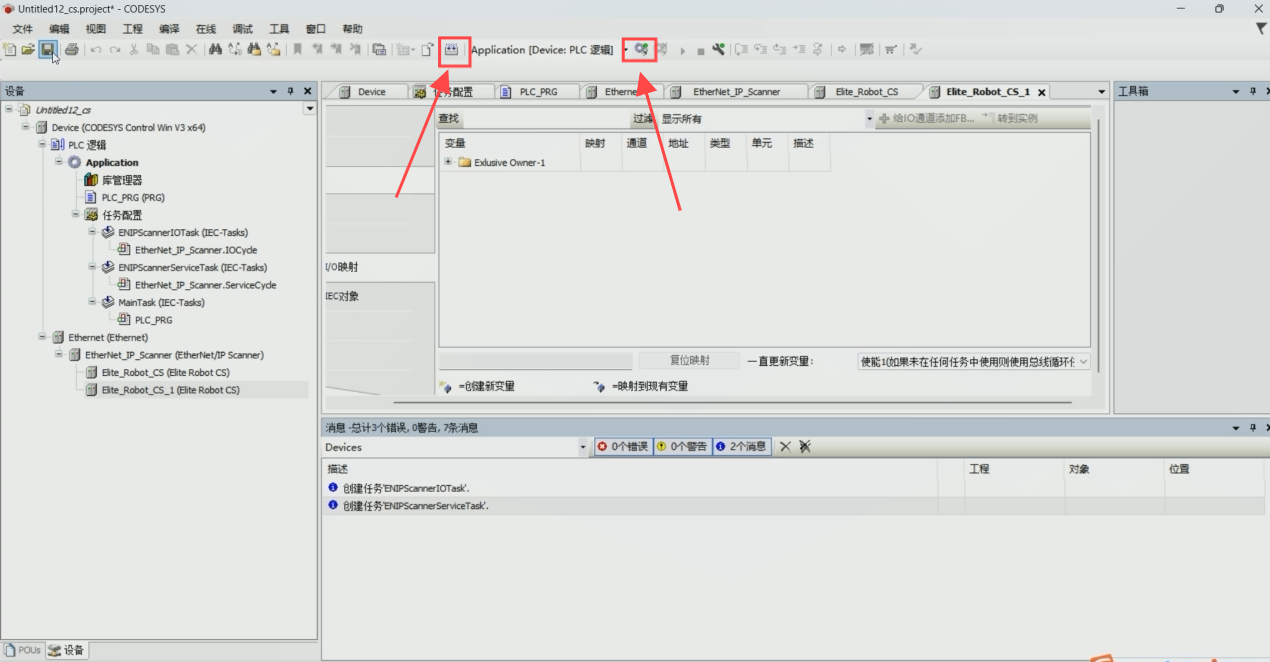
在電腦狀態欄中,將 PLC 和 Gateway
和 Gateway![]() 開啟,當圖標顏色變成紅色后為開啟。
開啟,當圖標顏色變成紅色后為開啟。
選擇Device-通訊設置-選擇對應電腦型號,掃描成功后,會保持激活狀態
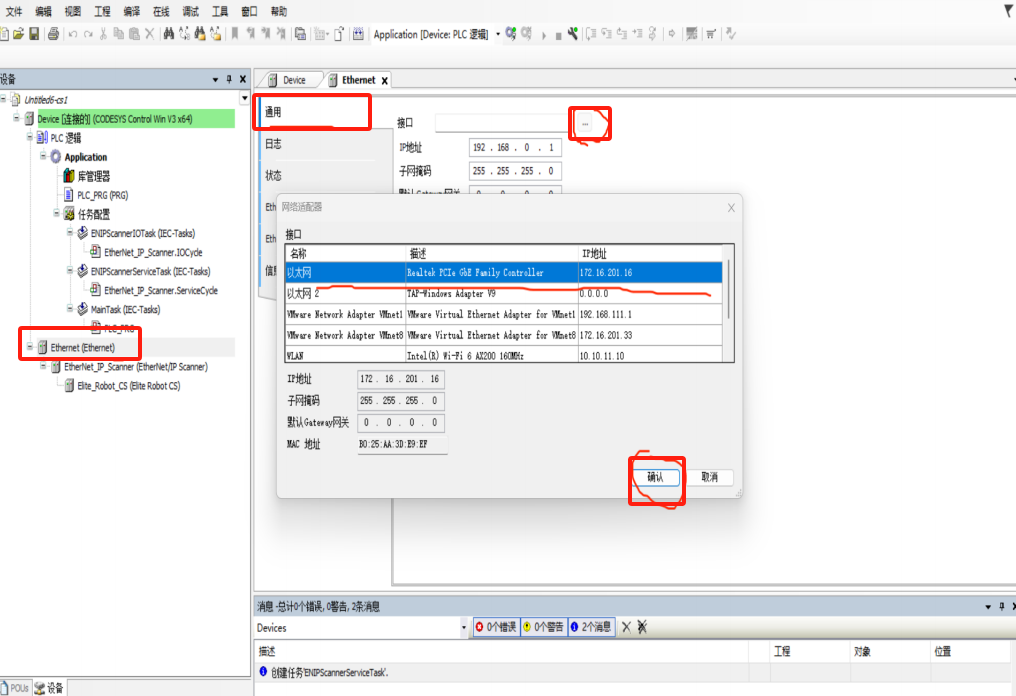
選擇Ethernet-通用-接口-選擇當前對應的以太網(當前電腦端口)
選擇EliteRobotCS-通用-IP地址-將機器人IP地址寫入進去(172.16.201.101)
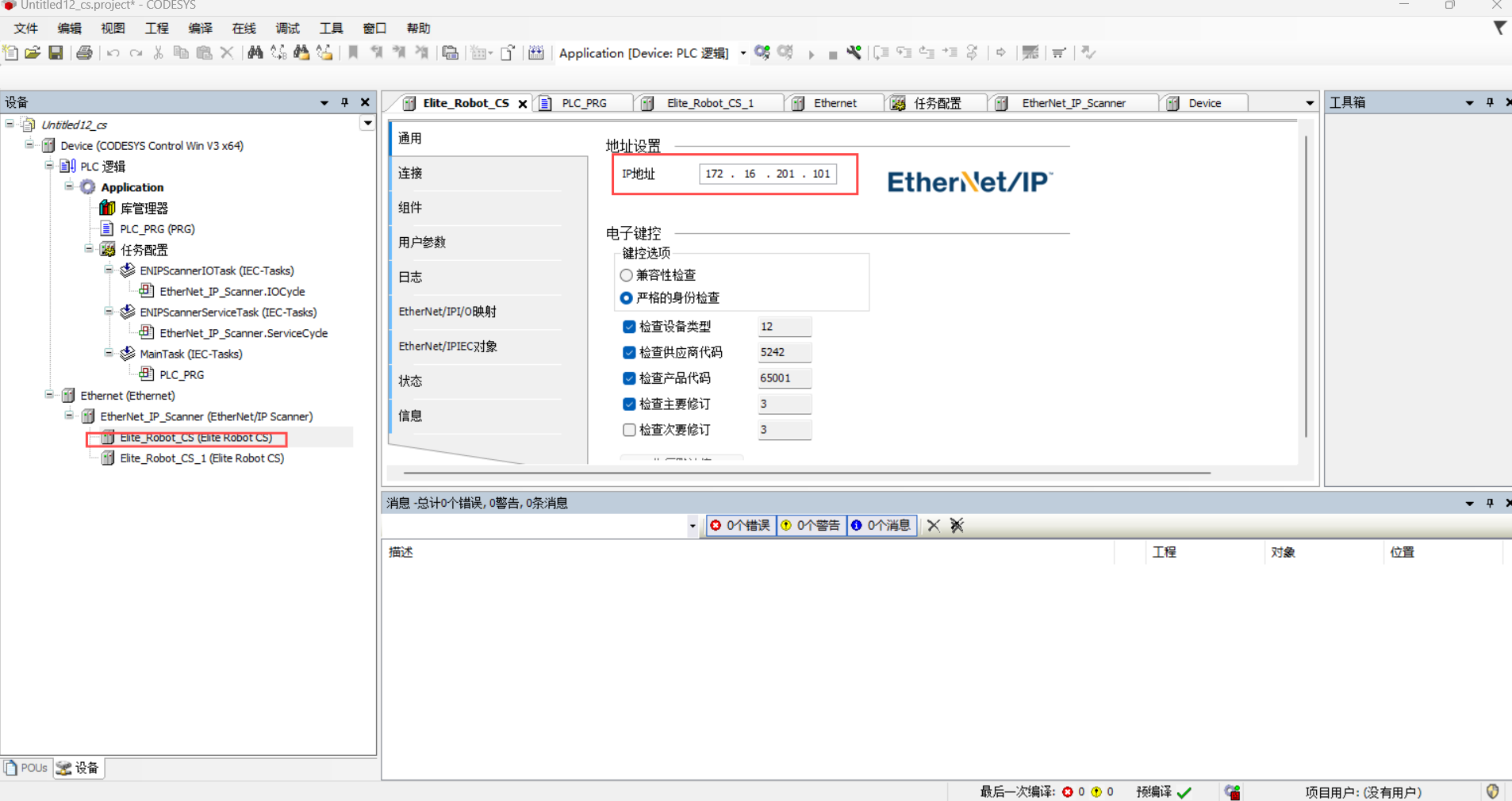
選擇EliteRobotCS_1-通用-IP地址-將機器人IP地址寫入進去(172.16.201.102)
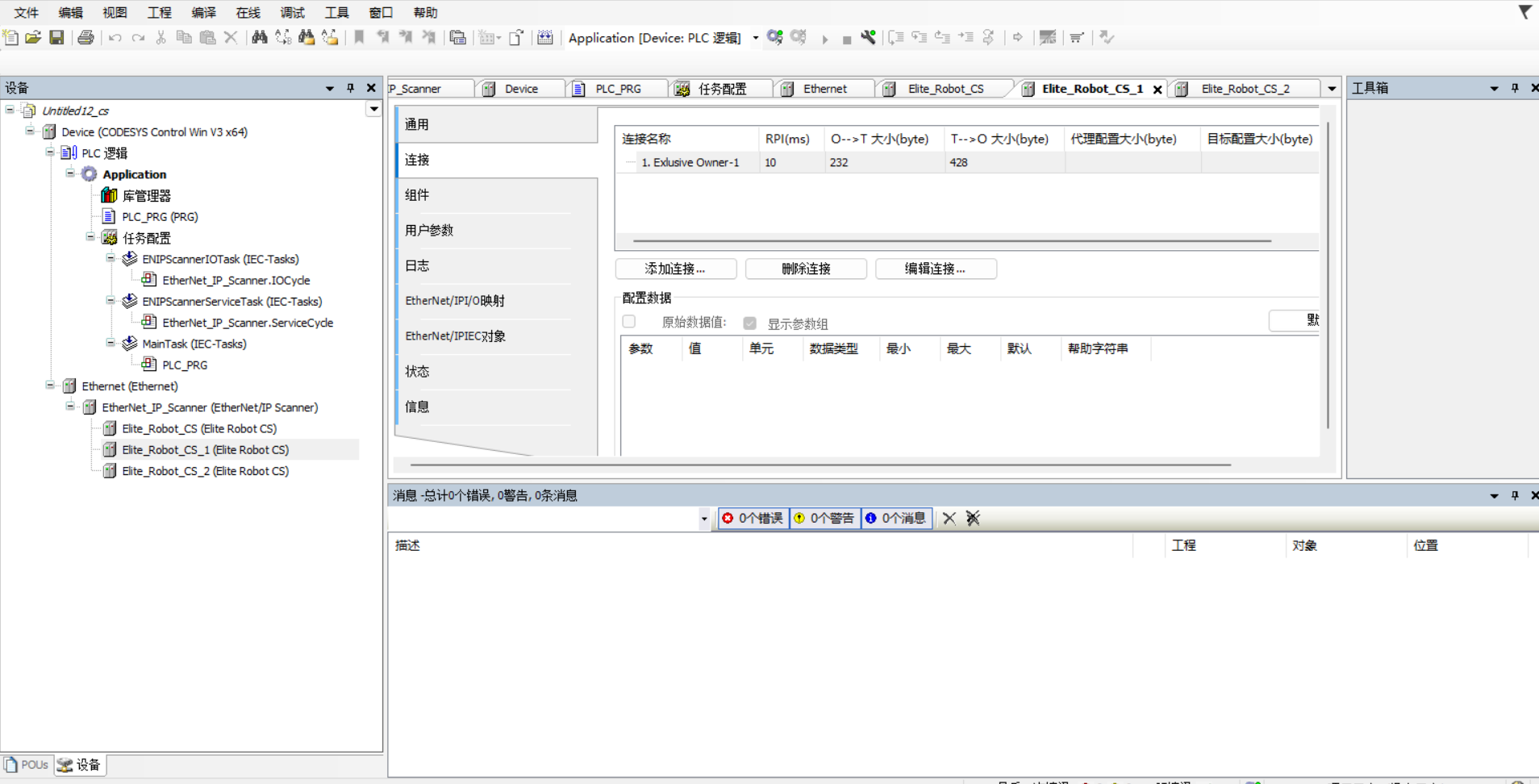
連接對應卡槽
2.12版本之前只能使用整體1個卡槽,所有的數據都在卡槽內,占用硬件內存較多
2.12版本之后,卡槽進行了分類,可以選擇整體卡槽,也可以單獨選擇想用的功能卡槽,可減少硬件內存使用。
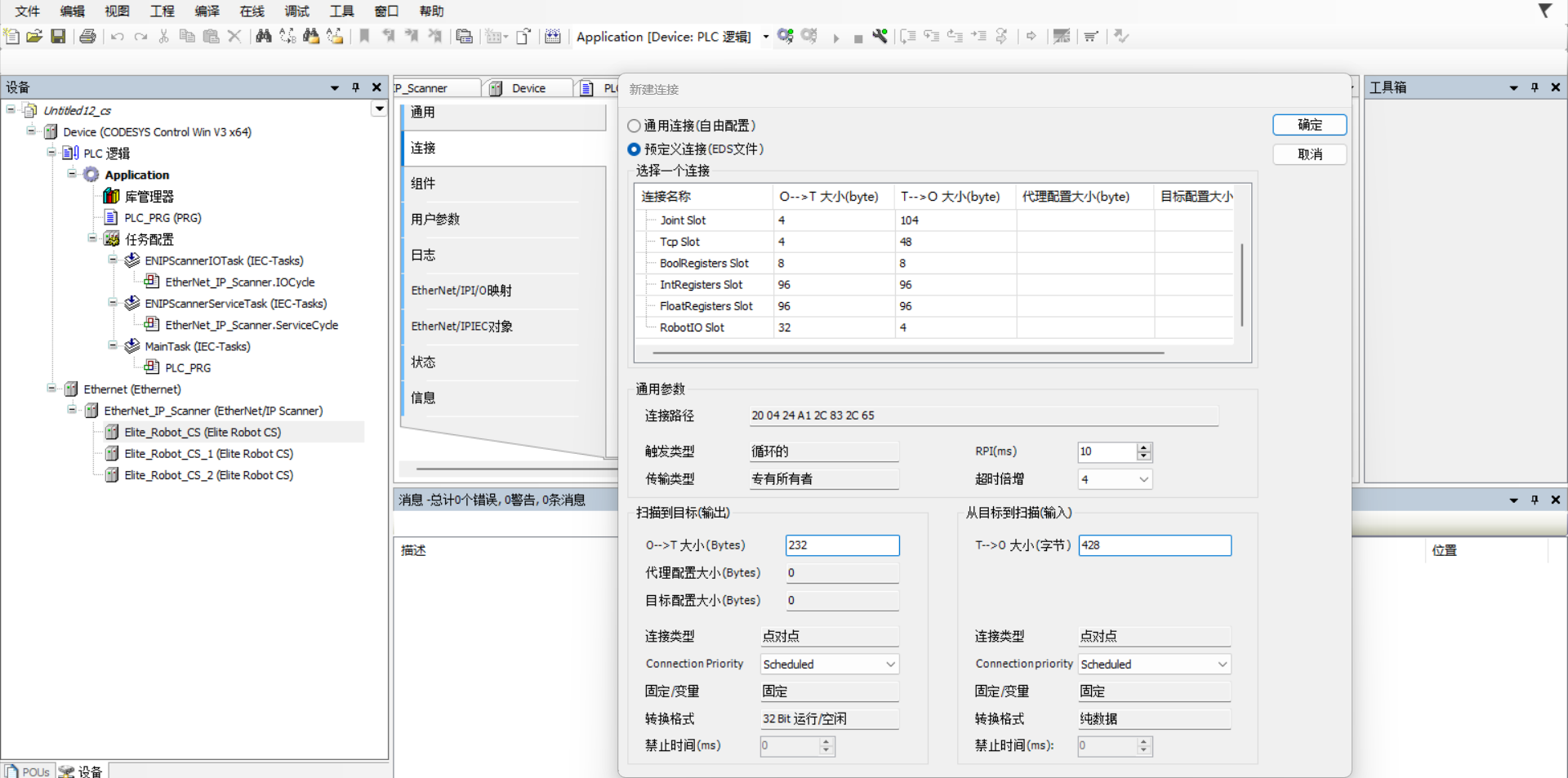
可根據不同版本選擇對應的eds文件
編譯程序并下載,啟動程序并運行
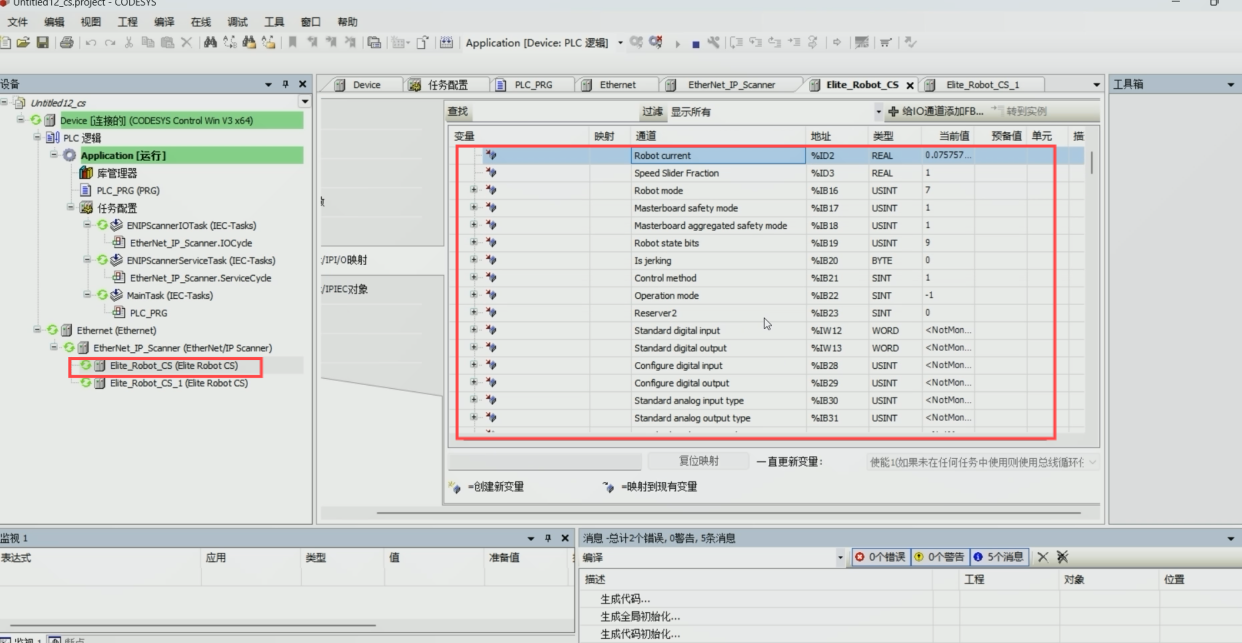
2.2.5 機器人與codesys數據通訊
選擇Elite_Robot_ CS---Ethernet/IPI/O映射,將ExlusiveOwner-1展開,可看到機器人當前的一些具體信息 (具體報文數據查看附錄中的《CS_用戶手冊_EthernetIP數據格式》文檔)
查看codesys輸入布爾量數據
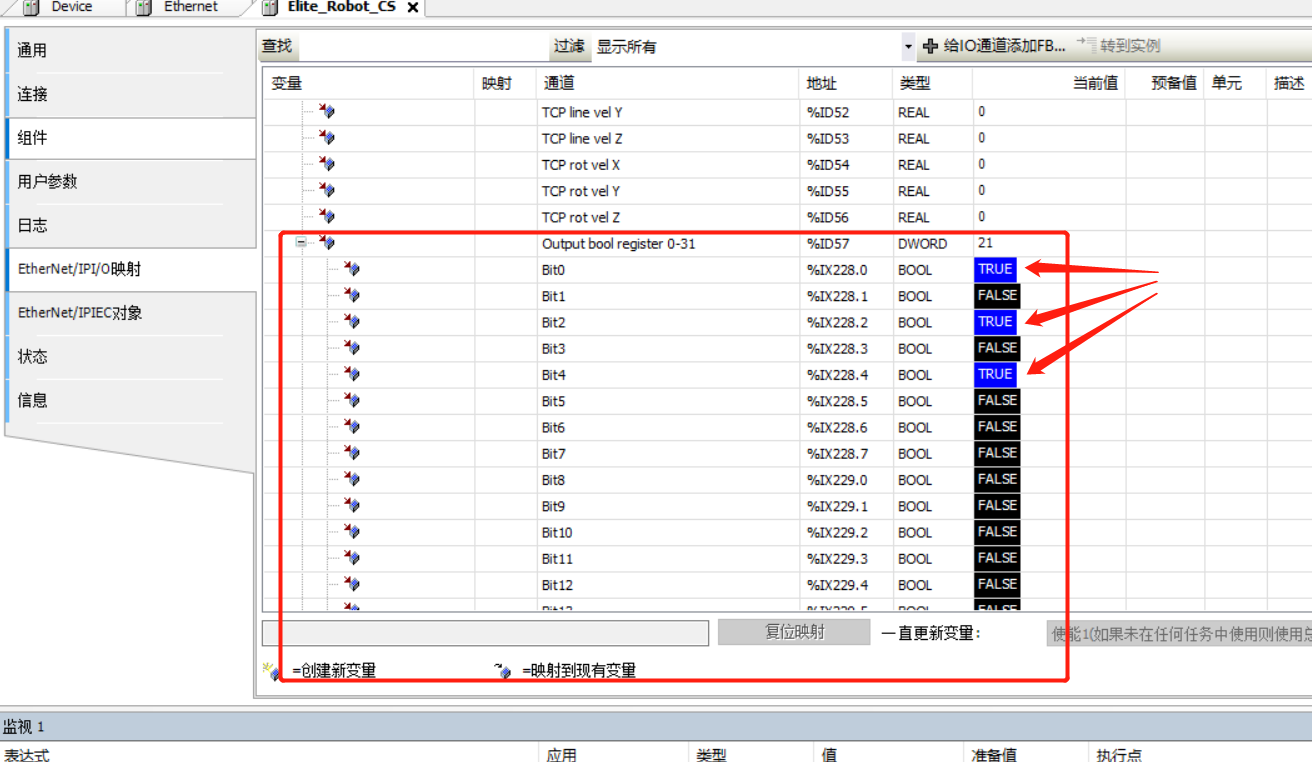
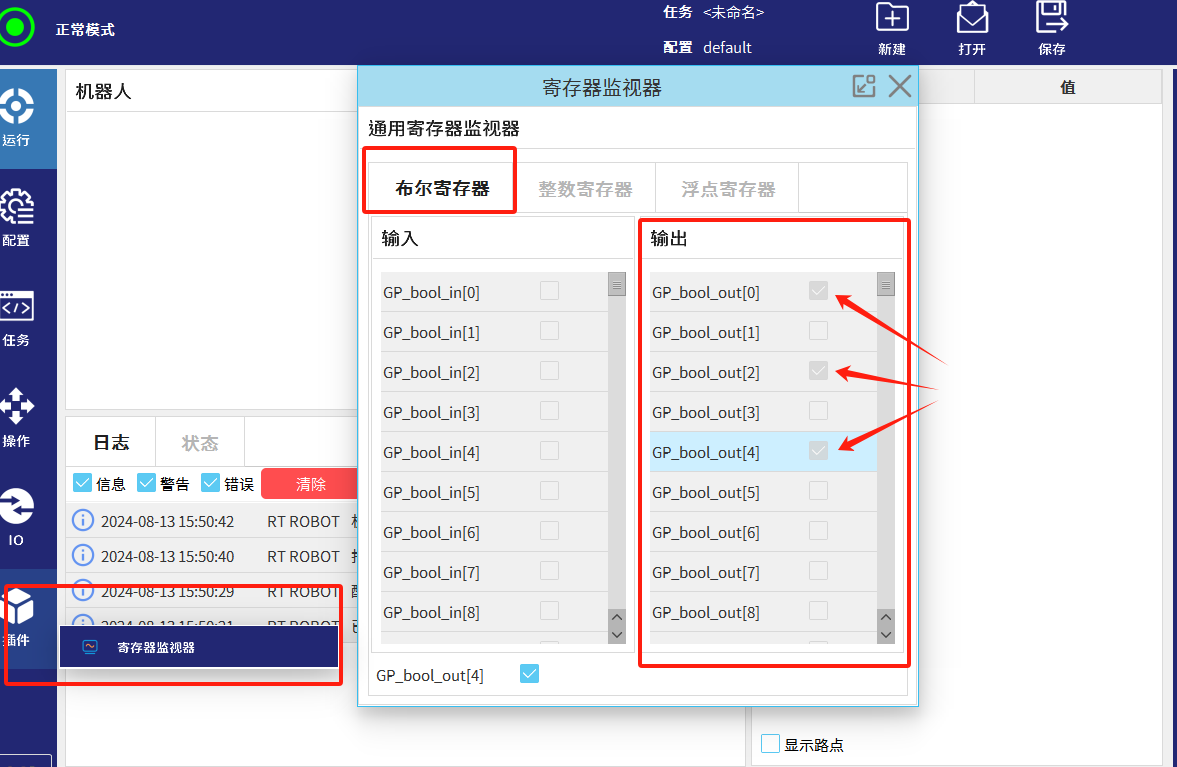
機器人布爾量置位
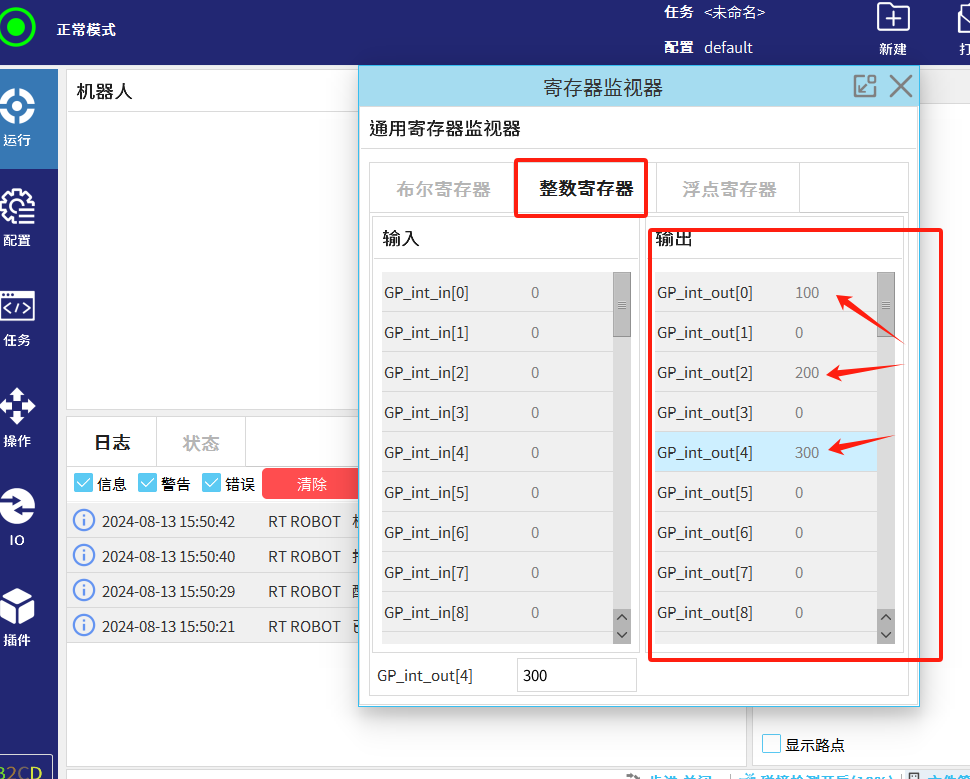
查看codesys輸入整型數據
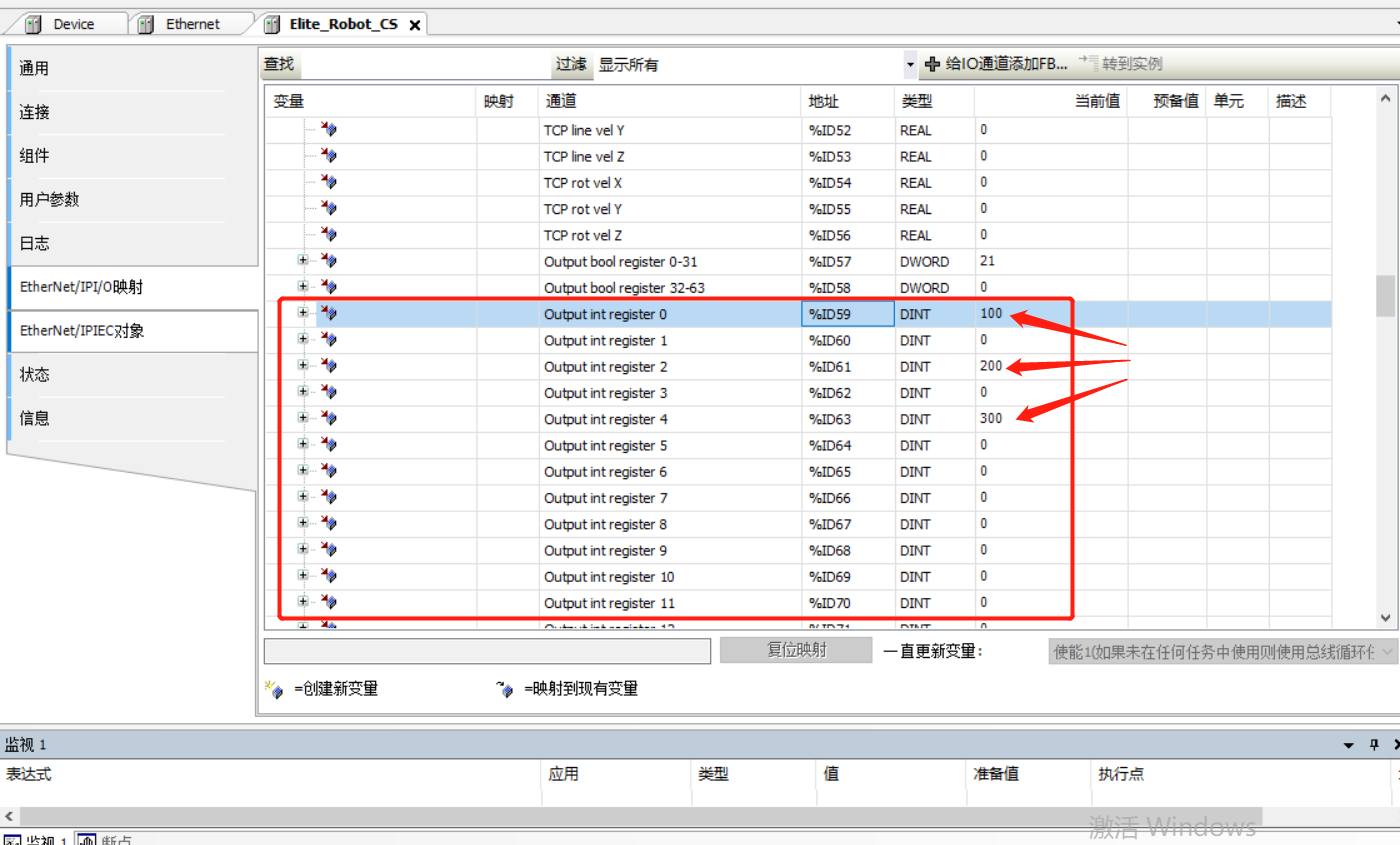
機器人寫入整型數據
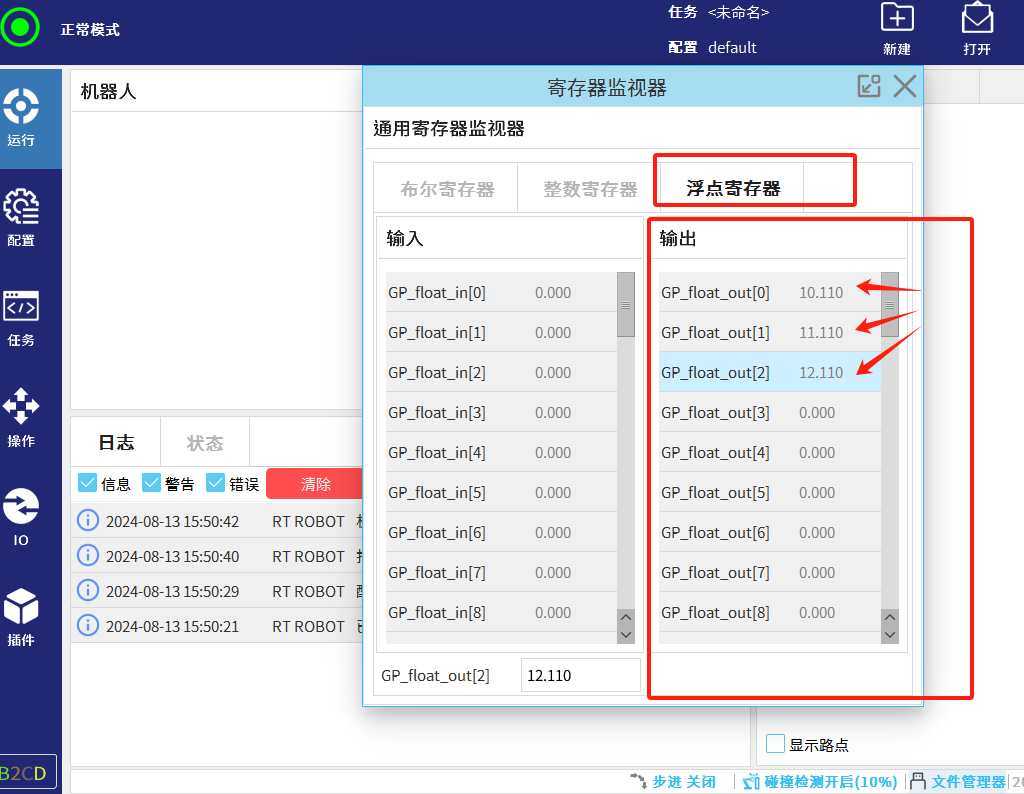
查看codesys輸入浮點數數據
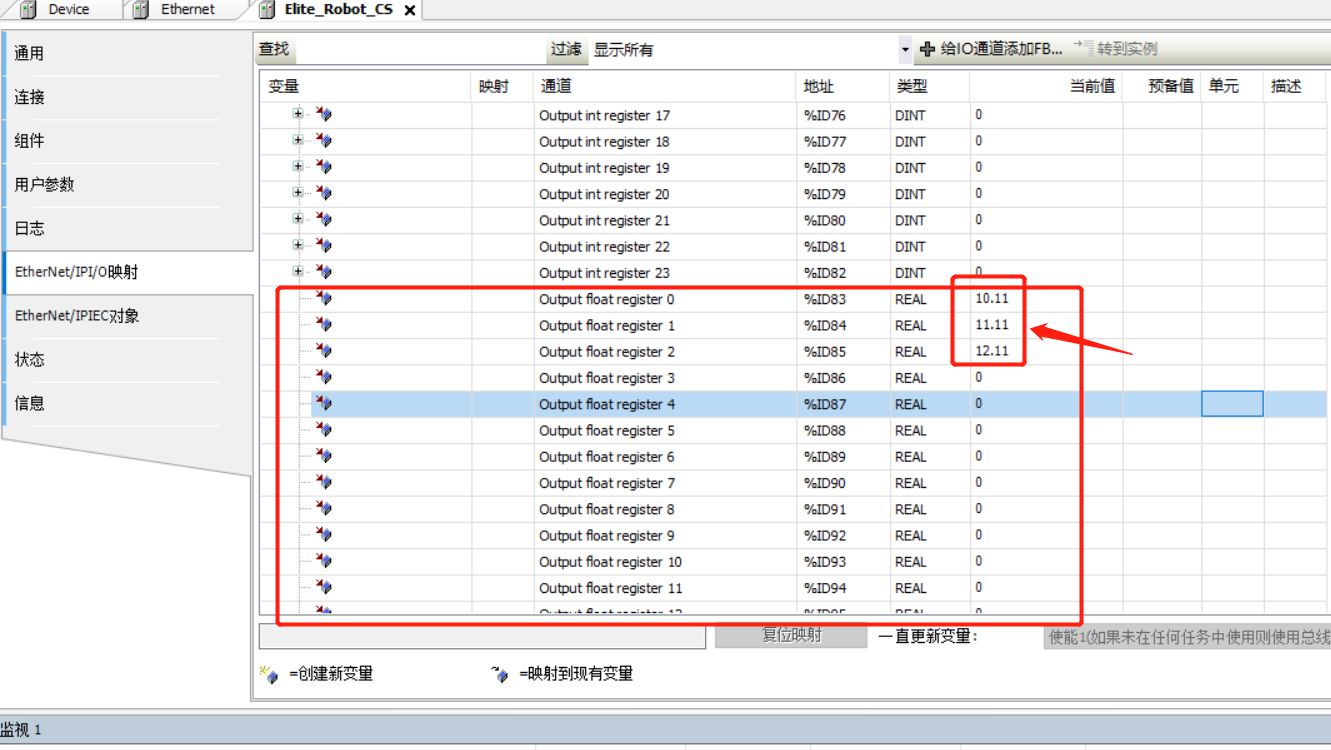
機器人寫入浮點數數據
3. 常見問題解答
3.1.如何在機器人里面使用寄存器監視?
使用附件的監視器插件
3.2.第二臺機器人通訊異常或者數據不更新
檢查網絡、IP地址,IO變量使能狀態
3.3版本不同使用的eds文件不同,占用內存不同
2.12版本之前eds文件只有一個整體卡槽,包含了整體數據,相對占用內存較高
2.12版本之后eds文件進行了細化,可以根據需要選擇對應的卡槽使用,不僅僅局限于整體卡槽
4. 示例
5. 附錄
CS_用戶手冊_EthernetIP數據格式.xlsx
RegisterMonitor-1.2.6.0.elico機器人寄存器監視插件
CS機器人使用EthernetIP教學_嗶哩嗶哩_bilibili


























